交流电动机分类及工作原理
交流电机是实现机械能与交流电能之间互相转换的一种装置,其分类可以分为以下几类:
1.按其功能分交流发电机和交流电动机两大类,交流电动机是将交流电能转换成机械能的装置。
2.按其原理不同,交流电动机可分为同步电动机和异步电动机两大类,同步电动机的旋转速度与交流电源的频率有严格的对应关系,在运行中转速严格保持恒定不变;异步电动机的转速随着负载的变化稍有变化。
3.按所需交流电源相数的不同,交流电动机又可分为单相和三相两大类,目前使用最广泛的是三相异步电动机,这是由于三相异步电动机具有结构简单、价格低廉、坚固耐用、使用维护方便等优点。在没有三相电源的场合及一些功率较小的电动机则广泛使用单相异步电动机。
4.三相异步电动机根据其转子结构的不同又可分鼠笼式和绕线式两大类,其中鼠笼式应用最为广泛。
二、三相异步电动机的结构
三相异步电动机主要由定子和转子两个部分组成,结构如图1所示
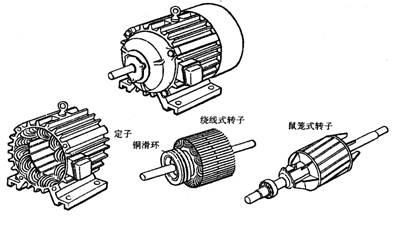
图1 异步电动机结构
1.定子部分
包括机座,定子铁心和定子绕组。机座通常用铸铁或铸钢制成,铁心用硅钢片叠成圆筒形,铁心的内圆上有若干分布均匀的平行槽,槽内安装定子绕组。定子绕组是电动机的电路部分,三相电动机的定子绕组由三相对称的绕组组成。三相绕组的各相绕组彼此独立,按互差1200电角度嵌放在定子,各绕组起绐端分别为U1、U2、V1、V2、W1、W2,从机座上的接线盒中引出。根据要求将三相定子绕组接成星形(Y形)或三角形(△形),具体接线方式如图2所示。
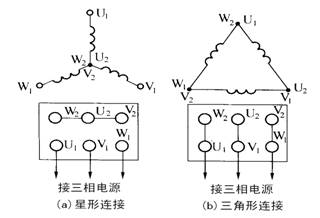
图2 三相异步电动机定子绕组的接线图
电动机如果接成星形,则电机每相绕组承受电压是电源的相电压,如果接成三角形,则电机每相绕组承受电压是电源的线电压。具体是星形连接还是三角形连接应考虑电机的额定电压值。
例如:电机额定电压是220V应采用星形连接,如额定电压是380V应采用三角形连接。
2.转子部分
由转子铁心、转子绕组和转轴等部分组成。转子铁心也由硅钢片叠成,并固定在转轴上。转子的外圆周上也有若干分布均匀的平行槽,用于安置转子绕组。
转子绕组根据其结构可分为鼠笼式和绕线式两种
(1)鼠笼式转子
鼠笼式转子是在转子铁心的每一条槽内,插入一根裸导条,在铁心两端分别用两处短路环把导条连接成一个整体,形成一个自身闭合的短路绕组。如去掉铁心,整个绕组就像一个鼠笼,所以称为鼠笼式电动机,中小型电动机的笼型转子一般采用铸铝,大型电动机则采用铜导条,如图3所示。
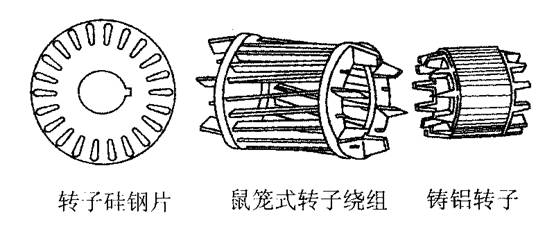
图3 笼式转子示意图
(2)绕线式转子
绕线式转子是在平行槽内嵌入对称的三相绕组,并把它接成星形,其末端接在一起,首端分别接在转轴上的三个彼此绝缘的滑环上,经电刷与外电路连接,这种电动机称为绕线式电动机。如图4所示

图4 绕组式转子
8.2.3三相异步电动机的工作原理
1.三相绕组产生的磁场
三相异步电动机定子三相对称绕组通入三相对称交流电产生的磁通势可以采用数学分析法和图解法进行分析,我们现在采用简单、形象的图解法分析磁场的性质。
用图解法分析磁场的步骤是:
(1)绘出对称三相交流电流波形。
(2)选定ωt为0o,90o,180o,270o,360o几个瞬间,并将瞬时电流的实际方向标示在三相绕组中。
(3)根据右手螺旋定则,确定各瞬间合成磁通合磁通势的方向。
(4)观察各瞬时合成磁通势的方向,确定磁场性质。
下面予以具体分析:
图5为三相对称交流电的波形。假定电流瞬时值为正时电流方向从绕组的首端流进,尾端流出。电流瞬时值为负时则尾端流进,首端流出。电流的注入端符号“ ”表示,流出端用“
”表示,流出端用“ ”表示。图6为定子绕组三相对称交流电的作用下一个周期内所对应的磁场分布情况,图中交流电机的定子上安放着三相对称绕组U1―U2、V1―V2、W1―W2。
”表示。图6为定子绕组三相对称交流电的作用下一个周期内所对应的磁场分布情况,图中交流电机的定子上安放着三相对称绕组U1―U2、V1―V2、W1―W2。
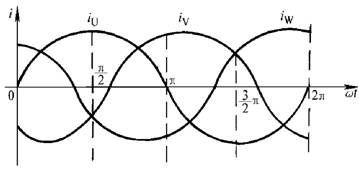
图5 三相对称交流电的波形
当ωt =0o时,U相电流瞬时值为0,W相电流瞬时值为正,电流从首端W1流入,用“ ”表示,从尾端W2流出,用“
”表示,从尾端W2流出,用“ ”表示;V相电流为负,因此电流从绕组的尾端流入首端流出,故尾端V2应填上“
”表示;V相电流为负,因此电流从绕组的尾端流入首端流出,故尾端V2应填上“ ”,首端V1应填上“
”,首端V1应填上“ ”。从图可见,合成磁场的轴线正好位于U相绕组的界面上。如图6 (a)所示。
”。从图可见,合成磁场的轴线正好位于U相绕组的界面上。如图6 (a)所示。
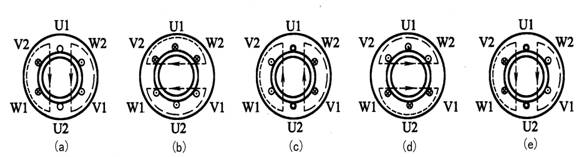
图6 一个周期内定子合成磁场分布图
(a)ωt =0o (b)ωt =90o(c)ωt =180o (d)ωt =270o (e)ωt =360o
当ωt=90o时,U相绕组电流瞬时值为正,V相和W相电流瞬时值为负,实际电流方向从U1流入U2流出后,分别再由V2、W2流入,V1、W1流出,电流合成磁场如图6(b)所示,可见磁场方向已较ωt=0o时顺时针转过90o。
用同样方法,可以分别画出ωt为180o,270o,360o时合成磁场,如图6(c)、图6(d)、图6(e)所示。从图示可见,随着交流电通入三相绕组所形成的磁场是一个旋转磁场,而且旋转磁场的转向取决于接入三相绕组的相序,只要调换电动机任意两相绕组所接的电源接线(相序),旋转磁场即反向转动(分析方法相同)。因此,旋转磁场产生的条件为:
(1)三相绕组必须对称,在定子铁心空间上互差120o电角度。
(2)通入三相对称绕组的电流也必须对称,大小、频率相同,相位相差120o。
旋转磁场的转速为:
 (1)
(1)
式中: ――旋转磁场的转速(同步转速),r/min;
――旋转磁场的转速(同步转速),r/min;
 ――三相交流电频率,Hz;
――三相交流电频率,Hz;
 ――磁极对数。
――磁极对数。
式1表示了对已制成的电动机,磁极对数已确定,即决定旋转磁场转速的唯一因素是电流频率。
我国电网频率 =50Hz,所以电动机同步转速与磁极对数的关系如表1所示。
=50Hz,所以电动机同步转速与磁极对数的关系如表1所示。
表1电动机同步转速与磁极对数的关系表
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
3000 |
1500 |
1000 |
750 |
600 |
500 |


2.三相异步电动机转子旋转原理
三相异步电动机的定子铁心线槽嵌放着三相对称绕组U1―U2、V1―V2、W1―W2。转子是一个闭合的多相绕组笼型电机。图7为异步电动机的工作原理图。图中定、转子上的小圆圈表示定子绕组与转子导体。当定子绕组接入三相交流电源时,流入定子绕组的三相对称电流在电动机的气隙内产生一个以同步转速 旋转的磁场。转子导体嵌放在转子铁心槽内,两端被导电环短接。当旋转磁场以顺时针方向旋转时,转子导体切割磁力线产生感应电动势,其方向用右手定则来判别,如图6所示。转子上半部异体中的电动势方向都是穿出纸面,用“
旋转的磁场。转子导体嵌放在转子铁心槽内,两端被导电环短接。当旋转磁场以顺时针方向旋转时,转子导体切割磁力线产生感应电动势,其方向用右手定则来判别,如图6所示。转子上半部异体中的电动势方向都是穿出纸面,用“ ”表示,下半部导体中的电动势方向都是进入纸面,用“
”表示,下半部导体中的电动势方向都是进入纸面,用“ ”表示。在转子回路闭合的情况下,转子导体中就有电流流过。如不考虑转子绕组电感,那么电流的方向与电动势的方向相同。
”表示。在转子回路闭合的情况下,转子导体中就有电流流过。如不考虑转子绕组电感,那么电流的方向与电动势的方向相同。
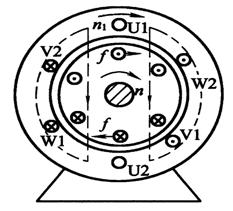
图7 异步电动机的工作原理
转子载流导体在旋转磁场中将受到电磁力的作用,导体所受到电磁力的方向可用左手定则来判断,如图6所示。转子上各导条都受到顺时针方向的力,这些力对转子以顺时针方向旋转,其转速为 ,与旋转磁场方向相同。由于转子导体电流是通过电磁感应产生的,所以也可以把这种电动机称作感应电动机。
,与旋转磁场方向相同。由于转子导体电流是通过电磁感应产生的,所以也可以把这种电动机称作感应电动机。
在正常情况下,异步电动机的转子转速不能达到旋转磁场的转速,这是因为转子导体在 =
= 时不切割定子旋转磁场,转子中就没有感应电动势及电流,也就不产生转矩,因此转子转速与定子旋转磁场的转速两者步伐不可能一致,所以称为异步电动机。例如四极异步电动机的同步转速
时不切割定子旋转磁场,转子中就没有感应电动势及电流,也就不产生转矩,因此转子转速与定子旋转磁场的转速两者步伐不可能一致,所以称为异步电动机。例如四极异步电动机的同步转速 =1500r/min,在额定负载时,它的转速约为1400r/min。
=1500r/min,在额定负载时,它的转速约为1400r/min。
通常我们将同步转速 与转子转速
与转子转速 之差对同步转速
之差对同步转速 之比称为转差率,式2,用s表示。即
之比称为转差率,式2,用s表示。即
 (2)
(2)
转差率 是异步电动机的一个基本物理量。反映异步电动机的各种运行情况。电动机启动时,
是异步电动机的一个基本物理量。反映异步电动机的各种运行情况。电动机启动时, =0,转差率s=1。理想空载转矩下,
=0,转差率s=1。理想空载转矩下, =
= ,则s=0。转子转速越高,转差率越小。通常异步电动机额定负载时的转差率在通常在0.01~0.06之间。即异步电动机的转速很接近同步转速。
,则s=0。转子转速越高,转差率越小。通常异步电动机额定负载时的转差率在通常在0.01~0.06之间。即异步电动机的转速很接近同步转速。
- 上一篇:Y2系列三相异步电动机 2014/2/8
- 下一篇:三相交流异步电动机常见故障及处理方法分析 2014/2/7
热门产品:异步电机 绕线式异步电动机 y系列三相异步电动机 交流电机 三相交流异步电动机 风机电机 水泵电机 起重电机
信息来源:湘电集团有限公司