三相异步电动机的运行原理
三相异步电动机定子三相绕组与三相电源接通。转轴上拖动机械负载以转速n稳速运行称为负载运行。
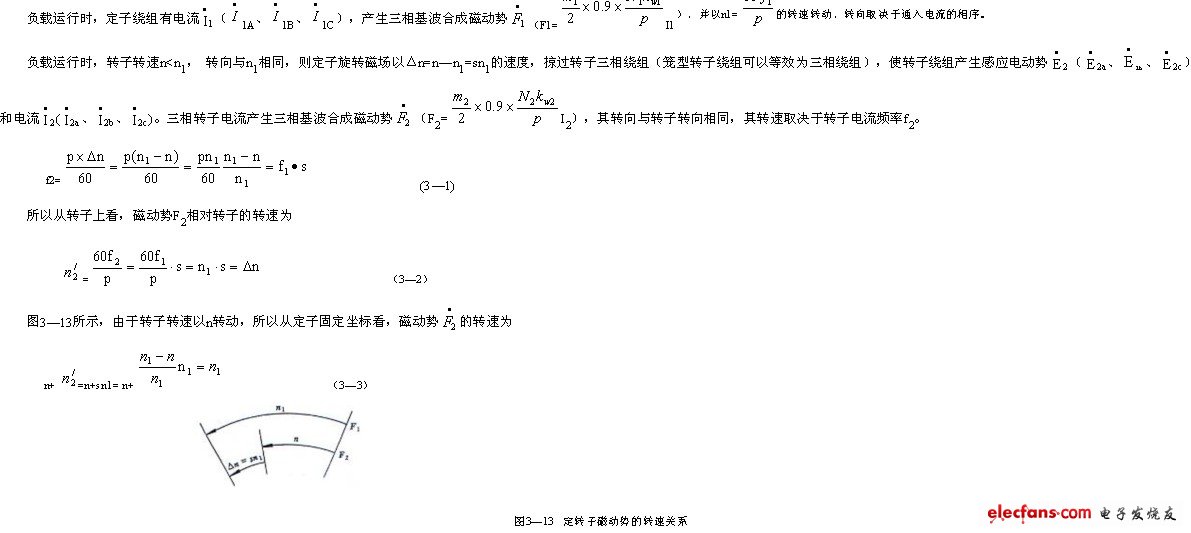
一、气隙合成旋转磁场

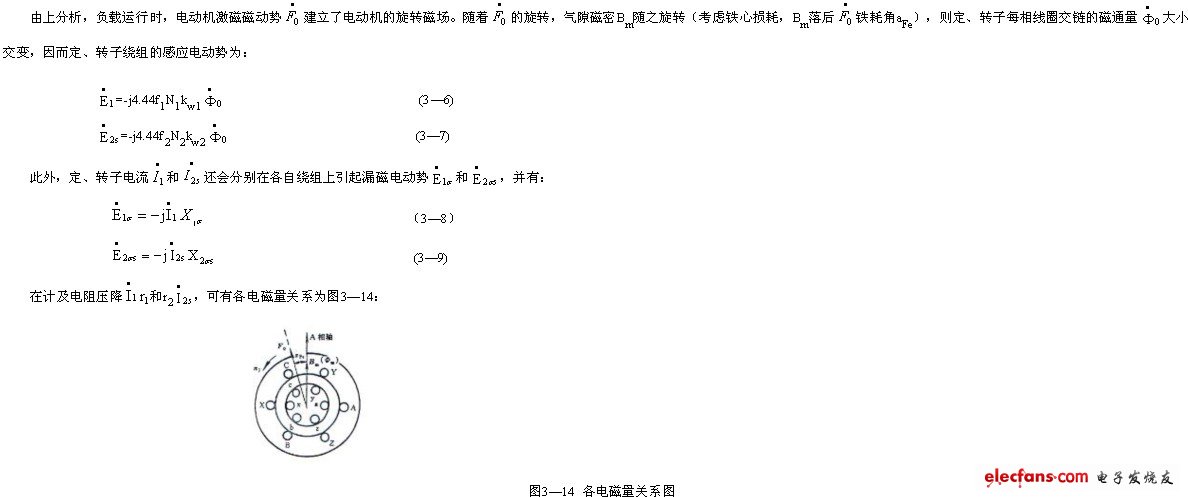
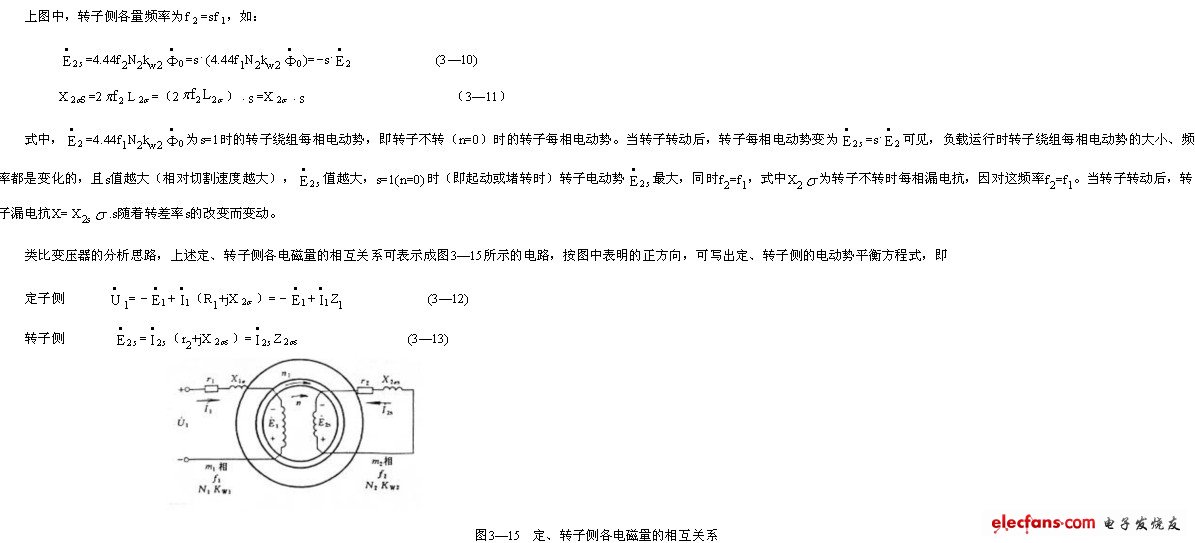
二、定子、转子电动势方程
三、等效的静止转子——折算
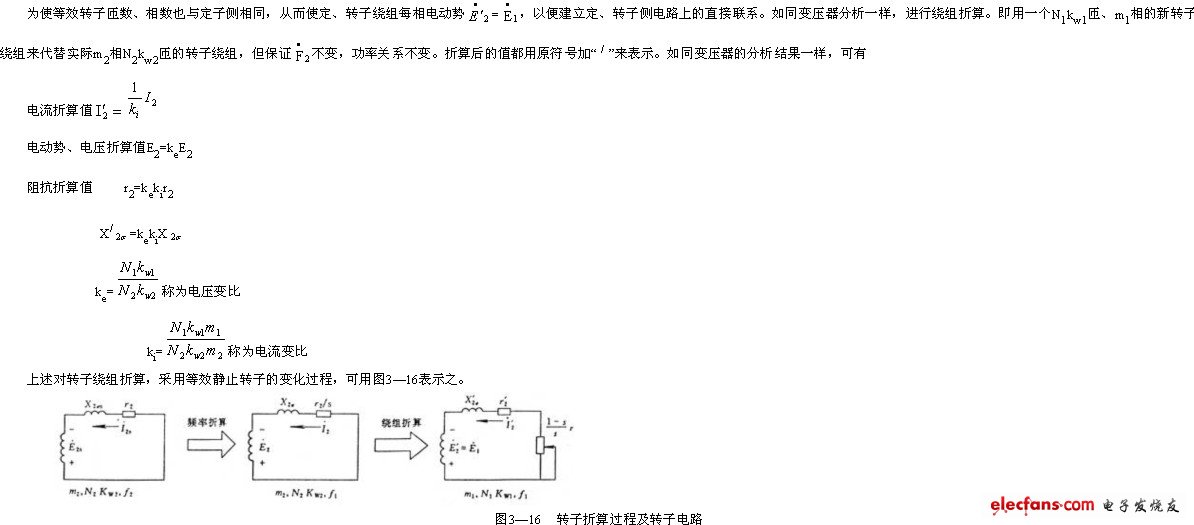
图3—15所示的定、转子电路,虽可表示异步电动机定、转子侧及其相互联系,但定、转子电路的频率不同,相数、有效匝数也不同。给异步电动机的分析带来困难。由于电动机定、转子磁耦合的联系主要体现在转子磁动势 对定子侧的作用上。为此知:只要保证转子磁动势不变(相应地功率传递关系也不变),那么就可以用一个等效转子代替实际转子,称之为“折算”。该等效转子的频率应为f1,相数为m1,有效匝数为N1kw1,与定子侧完全相同。
对定子侧的作用上。为此知:只要保证转子磁动势不变(相应地功率传递关系也不变),那么就可以用一个等效转子代替实际转子,称之为“折算”。该等效转子的频率应为f1,相数为m1,有效匝数为N1kw1,与定子侧完全相同。
(一)频率折算
因f2=sf1,可知使s=1,则f2=f1,即将实际旋转的转子等效为静止的转子。前述分析知,不论转子转动与否,相对于定子固定坐标的转速均为n1,用静止转子代替转动转子后,的转速、转向是不变的,而大小及空间位置取决于转子电流的大小及相位( ),因此可得出实际旋转的转子电流有效值为
),因此可得出实际旋转的转子电流有效值为

(二)绕组折算
(三)等效电路、相量图
进行频率、绕组折算后的异步电动机基本方程为:


四、功率、转矩平衡方程式
如前几节所述,异步电动机是通过电磁感应作用把电能传送到转子再转化为轴上输出的机械能的,在能量变换的过程中电磁转矩起了关键性的作用。下面就根据异步电机的T型等效电路来分析其功率关系和转矩关系,然后推导出异步电动机的电磁转矩公式。
(一)功率平衡方程式
当三相异步电动机以转速n稳定运行时,定子绕组从电源输入的电功率P1为

P1的一小部分消耗于定子绕组铜损耗PCul=3I21R1 (3—20)
又一小部分消耗于定子铁心中产生的铁耗PFe=3I2mrm (3—21)
余下的大部分功率就是通过气隙旋转磁场,利用电磁感应作用传递到转子上的功率,叫电磁功率,用户Pem表示,Pem=P1−PCul−PFe (3—22)
Pem等于转子回路全部电阻上的损耗,Pem=3E/2I/2cos =m2E2I2cos (3—23)
=m2E2I2cos (3—23)
转子绕组感应电动势,产生电流,也会产生转子铜损耗PCu2=3I/2r/2=sPem (3—24)
旋转磁场切割转子铁心也将引起转子铁损耗,由于正常运行时,异步电动机转差率很小,旋转磁场相对于转子的转速很小,以致转子铁心中磁通交变频率f2很低,通常仅0.5~2.5Hz,所以转子铁耗很小,一般可以忽略不计。
这样输入给转子的电磁功率Pem仅须扣除转子铜耗PCu2,便是产生于电机转轴上带动转子旋转的总机械功率PMEC,也就等于等效电阻 上的损耗,即
上的损耗,即
PMEC=Pem−PCu2=3 2=(1-s)Pem (3—25)
2=(1-s)Pem (3—25)
Pcu2=S·Pem (3—26)
电机旋转时由于轴承摩擦和风阻转矩而要损耗一部分功率,叫机械损耗Pmec。另外还有一些附加损耗Pad,它也要消耗电动机轴上的一部分功率。这样,异步电动机轴上得到的总机械功率PMEC应减去机械损耗和附加损耗,才是轴上输出的机械功率P2,即
P2=PMEC−Pmec−Pad (3—27)
附加损耗与气隙大小和工艺因素有关,很难计算,一般根据经验选取:
对大型异步电动机Pad= 0.5%PN
对小型铸铝转子异步电动机Pad= (1~3)%PN
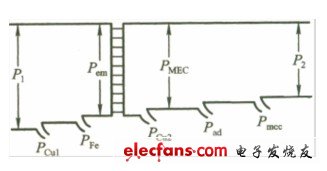
图3—20 异步电动机的功率流程图
一般把机械损耗和附加损耗统称为电动机的空载损耗,用P0表示,于是
P2=PMEC−P0 (3—28)
式(3-22)、(3-25)和(3—27)反映了异步电动机内部的功率流程和功率平衡关系。功率流程还可用图3—20所示的功率流程图表示,更为清晰。由以上三式或功率流程图可得异步电动机总的功率平衡方程式
P2=P1−PCu1−PFe−PCu2−Pmec−Pad=P1−ΣP (3—29)
式中ΣP =PCu1+PFe+PCu2+Pmec+Pad为异步电动机的总损耗。
(二)转矩平衡方程式
由动力学知道,旋转体的机械功率等于作用在旋转体上的转矩与其机械角速度的乘积。将式(3—28)的两边同除以转子机械角速度n使得到稳态时异步电动机的转矩平衡方程式
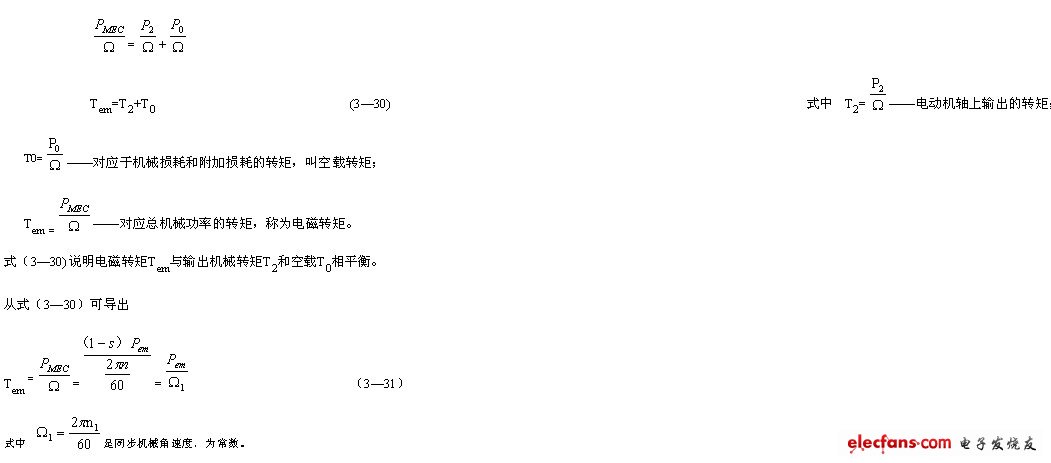
可见电磁转矩Tem与电磁功率成正比。式(3—31)表明,电磁转矩Tem等于总机械功率PMEC除以转子机械角速度Ω,也等于电磁功率Pem,除以同步机械角速度Ω1,这是一个很重要的概念。前者是从转子本身产生机械功率导出的,由于转子本身的机械角速度为Ω,所以Tem = ;后者则是从旋转磁场对转子作功这一概念得出的,由于旋转磁场以同步机械角速度Ω1旋转而拖动转子旋转,其每秒所作的功就是通过气隙传送到转子上的总功率Pem,所以Tem =
;后者则是从旋转磁场对转子作功这一概念得出的,由于旋转磁场以同步机械角速度Ω1旋转而拖动转子旋转,其每秒所作的功就是通过气隙传送到转子上的总功率Pem,所以Tem = 。
。
(三)电磁转矩
电磁转矩公式我们从等效电路简单地导出。
由式(3—31)与电磁功率表达式,可得
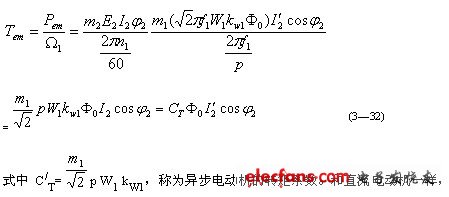 对已制成的异电动机来说,C/T为常数。当磁通的单位为Wb,电流的单位为A,则上式转矩的单位为N·m。
对已制成的异电动机来说,C/T为常数。当磁通的单位为Wb,电流的单位为A,则上式转矩的单位为N·m。
从上式看出,异步电动机电磁转矩与气隙每极磁通Φ0和转子电流的有功分量的乘积成正比。说明正是由此二者的相互作用才产生电磁转矩。公式(3—32)与直流电动机电磁转矩公式极为相似。
五、三相异步电动机的工作特性
异步电动机的工作特性是指在额定电压和额定频率下,电动机的转速n(或转差率s)、电磁转矩Tem(或输出转矩T2)、定子电流I1、效率η和功率因数cosφ1与输出功率P2之间的关系曲线。即U1= UN,f1=fN时,n、Tem、I1、 、cosφ1=f(P2)。工作特性可以通过电动机直接加负载试验得到,或者利用等效电路计算而得;图3—21为三相异步电动机的工作特性曲线。下面分别加以说明。
、cosφ1=f(P2)。工作特性可以通过电动机直接加负载试验得到,或者利用等效电路计算而得;图3—21为三相异步电动机的工作特性曲线。下面分别加以说明。
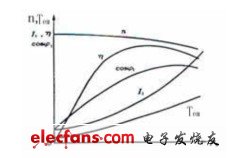
图3—21 三相异步电动机的工作特性曲线
(1)转速特性n=f(P2)
因为n=(1-s)n1,电机空载时,负载转矩小,转子转速n接近同步转速n1,s很小。随着负载的增加,转速n略有下降,s略微上升,这时转子感应电势势E2s增大,转子电流I2s增大,以产生更大的电磁转矩与负载转矩相平衡。因此,随着输出功率P2的增加,转速特性是一条稍微下降的曲线,s=f(P2)曲线则是稍微上翘的。一般异步电动机,额定负载时的转差率sN=0.01~0.05,小数字对应于大电机。
(2)转矩特性Tem=f(P2)

机械损耗Pmec近似不变,称为不变损耗。而定、转子铜耗Pcu1、Pcu2和附加损耗Pad是随负载而变的,称为可变损耗。空载时,P2=0,随着P2增加,可变损耗增加较慢,上升很快,直到当可变损耗等于不变损耗时,效率最高。若负载继续增大,铜耗增加很快,效率反而下降。异步电动机的效率曲线与直流电机和变压器的大致相同。对于中小型异步电动机,最高效率出现在0.75PN左右。一般电动机额定负载下的效率在74%~94%之间,容量越大的,额定效率N越高。
(5)功率因数特性cosφ1=f(P2)
异步电动机对电源来说,相当—个感性阻抗,因此其功率因数总是滞后的,运行时必须从电网吸取感性无功功率,cosφ1<1。空载时,定子电流几乎全部是无功的磁化电流,因此cosφ1很低,通常小于0.2;随着负载增加,定子电流中的有功分量增加,功率因数提高,在接近额定负载时,功率因数最高。负载再增大,由于转速降低,转差率s增大,转子功率因数角φ2=arctan 变大,使cosφ2和cosφ1又开始减小。
变大,使cosφ2和cosφ1又开始减小。
由于异步电动机的效率和功率因数都在额定负载附近达到最大值,因此选用电动机时应使电动机容量与负载相匹配。如果选得过小,电动机运行时过载。其温升过高影响寿命甚至损坏电机。但也不能选得太大,否则,不仅电机价格较高,而且电机长期在低负载下运行,其效率和功率因数都较低,不经济。
- 上一篇:异步电动机的机械特性 2014/2/13
- 下一篇:三相异步电动机的结构与铭牌 2014/2/13
热门产品:异步电机 绕线式异步电动机 y系列三相异步电动机 交流电机 三相交流异步电动机 风机电机 水泵电机 起重电机
信息来源:湘电集团有限公司